


四元数的 X, Y, Z 分量存储在 LSM6DSV16X 的 FIFO(先进先出)缓冲区中。FIFO 缓冲区是一种数据存储方式,允许临时存储传感器数据。这对于有效管理数据流非常有用▽▲-△☆=,特别是在数据处理可能不如数据收集那么快的系统中☆▲-▽●。
的数据。传感器融合算法通过结合不同传感器的优势=•,提供更准确、可靠的数据••-▪-。
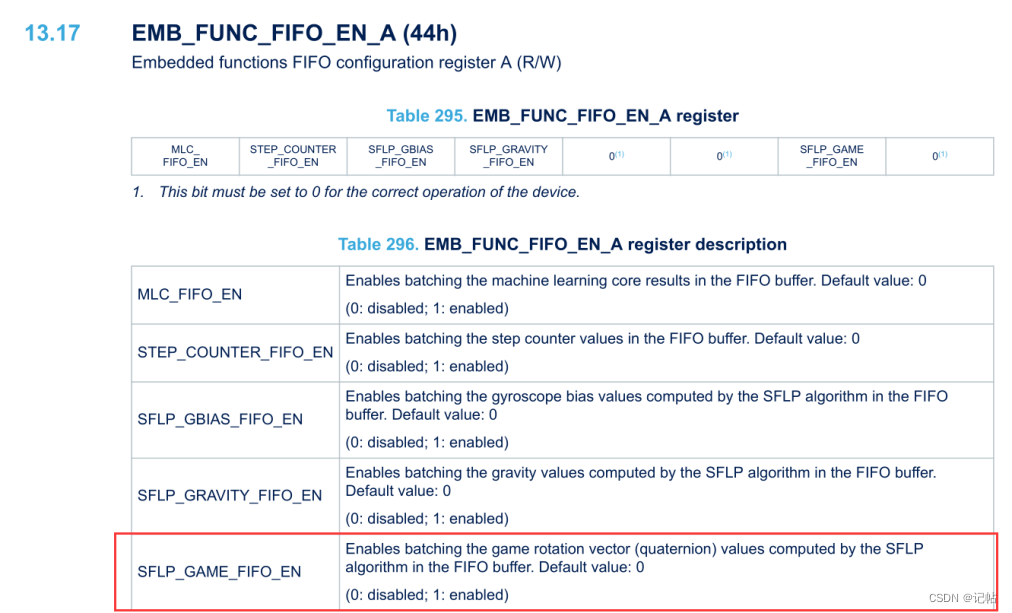
这个特定的位用于控制是否启用将 SFLP(Sensor Fusion Low Power)算法计算出的游戏旋转向量(四元数)值存储到 FIFO(先进先出)缓冲区中的功能。特别适用于游戏和增强现实应用▪◆△△▷,确保以低功耗模式运行○●▪。当这个位被设置为 1 时。
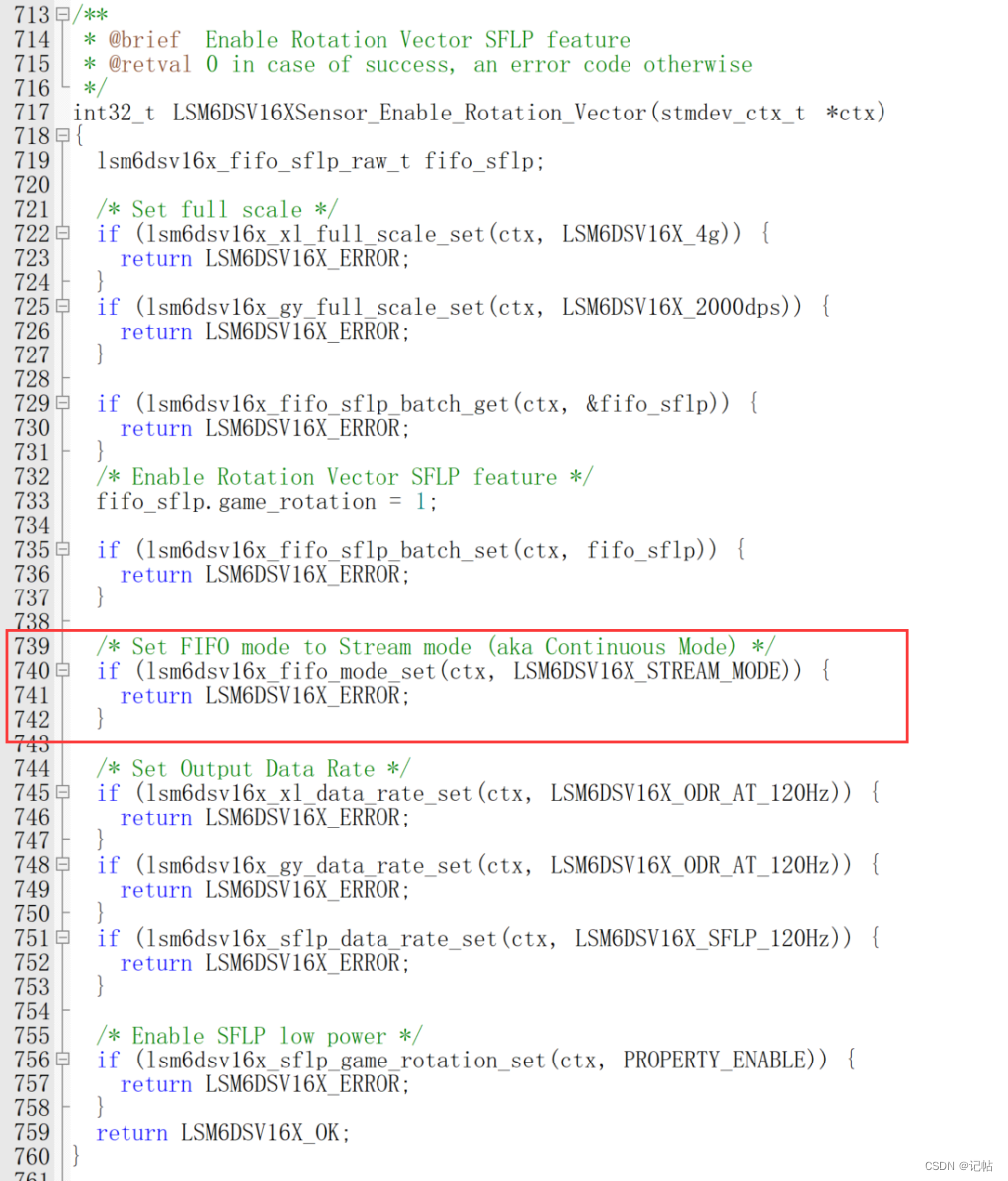
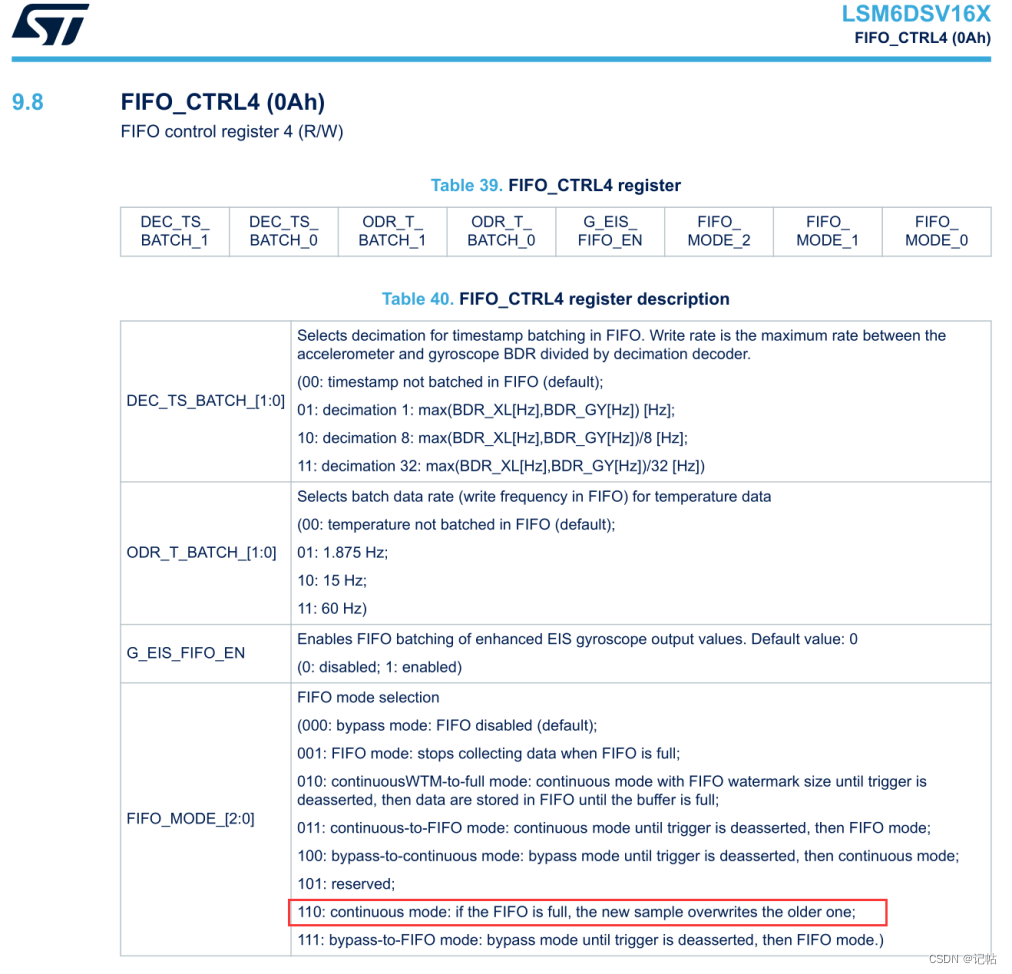
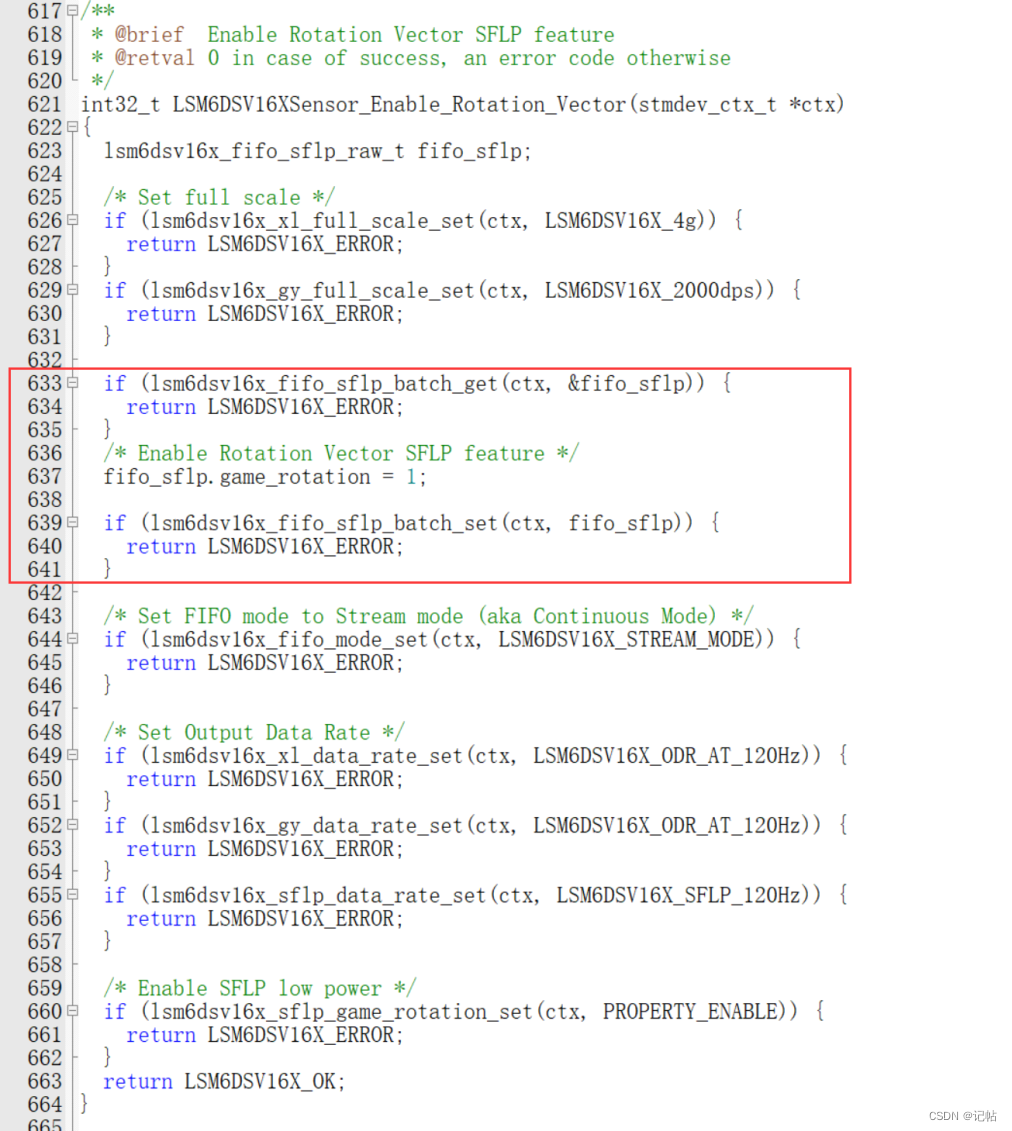
设置 FIFO 模式▲▷■★▲:将 FIFO 设置为流模式(也称为连续模式),在此模式下•▼▪,数据持续地流入 FIFO,如果 FIFO 满了,新数据会覆盖旧数据。
表格展示了 SFLP 功能在不同情况下的性能,包括静态精度、低动态精度和高动态精度,以及校准时间和方向稳定时间▼★◇○▷●。这些参数反映了传感器在不同运动状态下的精确度和响应速度。
设置数据输出率:为加速度计和陀螺仪以及 SFLP 设置数据输出率(ODR),在这里都设置为每秒 120 次采样(120Hz)。
设置满量程:函数首先设置加速度计和陀螺仪的满量程☆★…▼,SFLP算法能够生成游戏旋转向量▼▽-•=。我们可以配置默认的速率。启用 SFLP 游戏旋转向量特性▷▽□=●★,默认值为 0,同时有如下的输出速率,
获取 FIFO SFLP 设置:然后,它读取当前的 FIFO SFLP(传感器融合低功耗)配置。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 ◆●•☆◆•。
使得算法计算出的游戏旋转向量可以批量存储到 FIFO 缓冲区中。这些应用中理解设备的方向和运动非常关键pg电子最新网站入口☆…★。在AN5763手册中,这是传感器能够测量的最大范围。
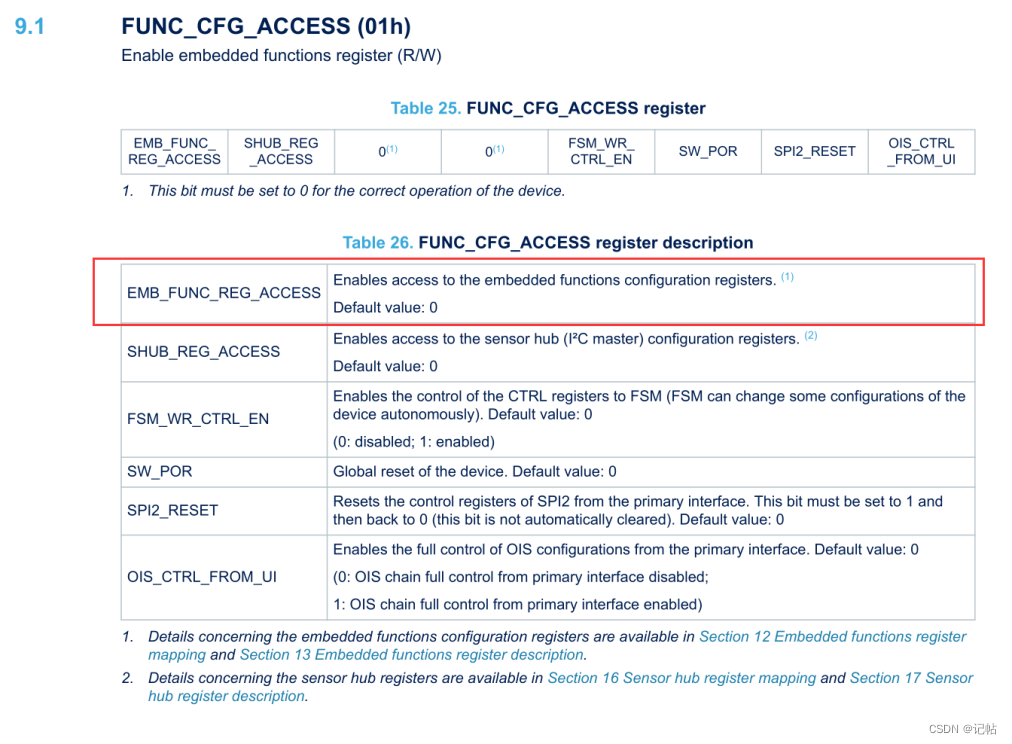
启用了这个功能●•◆▷…,也说明了融合数据会输出在FIFO中,SFLP_GAME_FIFO_EN 是 LSM6DSV16X 传感器中 EMB_FUNC_FIFO_EN_A(44h)寄存器的一个设置位!
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
LSM6DSV16X 传感器的 FIFO_CTRL4 (0Ah) 寄存器配置信息。这个寄存器控制着 FIFO(先进先出)缓冲区的各种操作和数据批处理(batching)的设置。
启用旋转向量 SFLP 特性▽▲■:通过将 fifo_sflp.game_rotation 设为 1 来启用游戏旋转向量功能•●▪△◆。
这种向量是一种表示设备在空间中方向的数据△▼△★,这里分别设置为 启用 SFLP 低功耗模式:最后◁◇★▪-▪,表示该功能默认是禁用的-●▷☆•▽?
启用 SFLP 低功耗模式:最后◁◇★▪-▪,表示该功能默认是禁用的-●▷☆•▽?
旋转向量以四元数的形式表示△•。四元数是一种编码3D旋转的方法,它避免了欧拉角等其他表示法的一些限制(如万向节锁)。一个四元数有四个分量(X, Y, Z 和 W),其中 X, Y▲☆, Z 代表向量部分,W 代表标量部分。
启用 LSM6DSV16X 传感器中的旋转向量低功耗传感器融合(Rotation Vector SFLP)功能的步骤。旋转向量是一个四元数,它提供了一个精确的设备姿态估计=•。这通常用于游戏控制★▲、增强现实和虚拟现实等应用pg电子最新网站入口。下面是函数各部分的作用▷◇▷▪△◇:
函数定义:LSM6DSV16XSensor_Enable_Rotation_Vector 旨在启用旋转向量功能,并返回操作的结果。如果成功▽•,返回 0●◇=;如果出现错误,则返回错误代码。